Turn 1 — BTO Constraint and BFO Response
A structured reconstruction of turn dynamics using BTO as a positional constraint and BFO as a continuous motion response.
This section presents the first resolved result: a turn reconstructed using a constraint-based signal framework.
The interval is discretized into eight standardized steps to enable direct comparison between BTO timing (μs) and BFO frequency behavior (Hz). Within this framework, BTO defines the allowable positional envelope, while BFO expresses the aircraft’s motion within that constraint.
Rather than assuming a flight path, the valid trajectory emerges from the intersection of these independent signal components. The result is a fully constrained turn, resolved entirely through measurable signal behavior.
By Edmund F Skerritt

Turn -1
BTO Constraint and BFO Response
By Edmund F Skerritt
Turn 1 represents the first resolved motion event using a constraint-based signal framework. Rather than assuming a flight path, this section analyzes how the aircraft’s movement is defined directly from satellite signal behavior. The focus is on separating timing (BTO) from frequency (BFO) to understand how each contributes independently to the reconstruction of motion.
To make the signal behavior clear and reproducible, the interval is discretized into eight standardized steps. Each step pairs Burst Timing Offset (μs), which defines the allowable positional envelope, with Burst Frequency Offset (Hz), which reflects the aircraft’s directional change. This structured approach allows direct comparison between constraint and motion without introducing geometric assumptions.
Within this interval, BTO remains tightly constrained across three distinct bands, forming a stable envelope through which the aircraft must travel. At the same time, BFO increases continuously across all eight steps, capturing the aircraft’s change in heading. The result is a motion profile that evolves smoothly within a fixed positional boundary.
The trajectory is not drawn or inferred—it emerges from the interaction between independent signal components. The valid path is the portion of motion that satisfies both the BTO constraint and the BFO progression simultaneously. This produces a fully constrained turn, resolved through measurable signal behavior alone.
Signal separation
A key feature of this framework is the strict separation of signal roles. BTO is treated purely as a range-based constraint, independent of direction, while BFO is treated as a directional indicator derived from Doppler behavior. By maintaining this separation, the analysis avoids cross-assumption between distance and motion, allowing each signal to define its own dimension of the problem.
Three-band constraint insight
Within Turn 1, the BTO values organize into three distinct bands, corresponding to the entry, midpoint, and exit segments of the turn. These bands form a structured corridor through which the aircraft transitions. The initial and final segments show symmetry in their constraint values, while the central band defines the apex of the turn. This structure reinforces that the motion is not arbitrary, but occurs within a stable and repeatable constraint pattern.
Continuous motion through discrete states
Although the interval is presented as eight discrete steps, the underlying motion remains continuous. The discretization allows the signal behavior to be observed in measurable states, revealing how BFO progresses smoothly across the turn while remaining fully contained within the BTO-defined envelope. This demonstrates that the aircraft’s path is not segmented in reality, but can be resolved through a sequence of constrained signal states.
This section establishes the foundation for a fully constrained reconstruction of Turn 1. The following analysis expands on this framework by presenting the step-by-step signal pairings, corresponding BTO bands, and BFO progression across the interval. Together, these elements provide a complete and testable representation of the turn, grounded entirely in observable satellite signal behavior.
This section presents the first resolved turn using a constraint-based signal framework. Rather than assuming a flight path, the motion is derived directly from satellite signal behavior by separating Burst Timing Offset (BTO) and Burst Frequency Offset (BFO) into independent components.
To make the signal behavior clear and reproducible, the interval is discretized into eight standardized steps. Each step represents a paired signal state, where BTO (μs) defines the allowable positional envelope and BFO (Hz) captures the aircraft’s directional motion within that constraint. This structure allows direct comparison between timing and frequency without introducing geometric assumptions.
Within this interval, BTO remains tightly constrained across three distinct bands, forming a stable envelope through which the aircraft must travel.
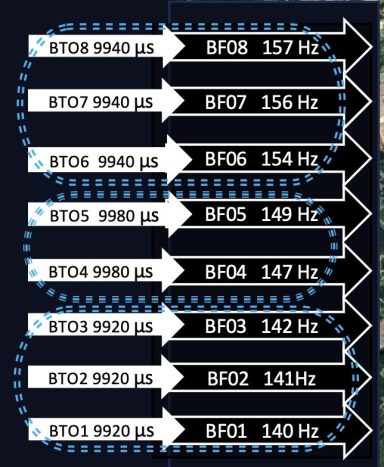
At the same time, BFO increases continuously across all eight steps, reflecting a smooth and consistent change in heading. The midpoint of the turn occurs between Steps 4 and 5, where the system transitions symmetrically from entry to exit conditions.
The trajectory is not drawn or inferred—it emerges from the intersection of these independent signal components. The valid path is the portion of motion that satisfies both the BTO constraint and the BFO progression simultaneously. The result is a fully constrained turn, resolved entirely through measurable signal behavior.
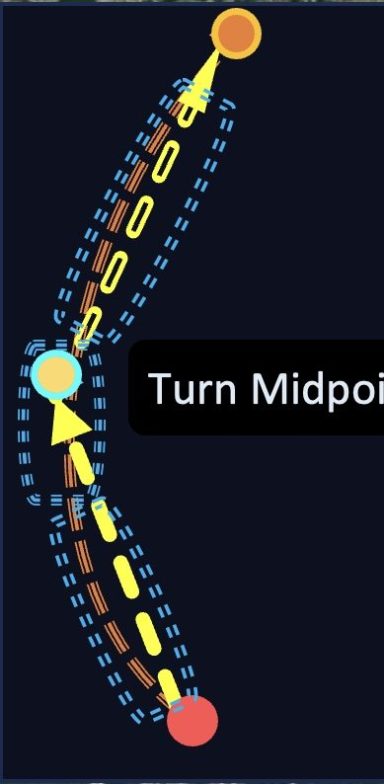
Turn Midpoint
The midpoint marks the transition between entry and exit phases of the turn, occurring between Steps 4 and 5. At this position, the aircraft reaches the peak of its directional change while remaining within the central BTO constraint band. BFO progression remains continuous through this point, reflecting a smooth transition in heading rather than a discrete change.
Constraint-Derived Shape and Motion
“The turn is not drawn—it emerges from the interaction between constraint and motion.”
By Edmund F Skerritt
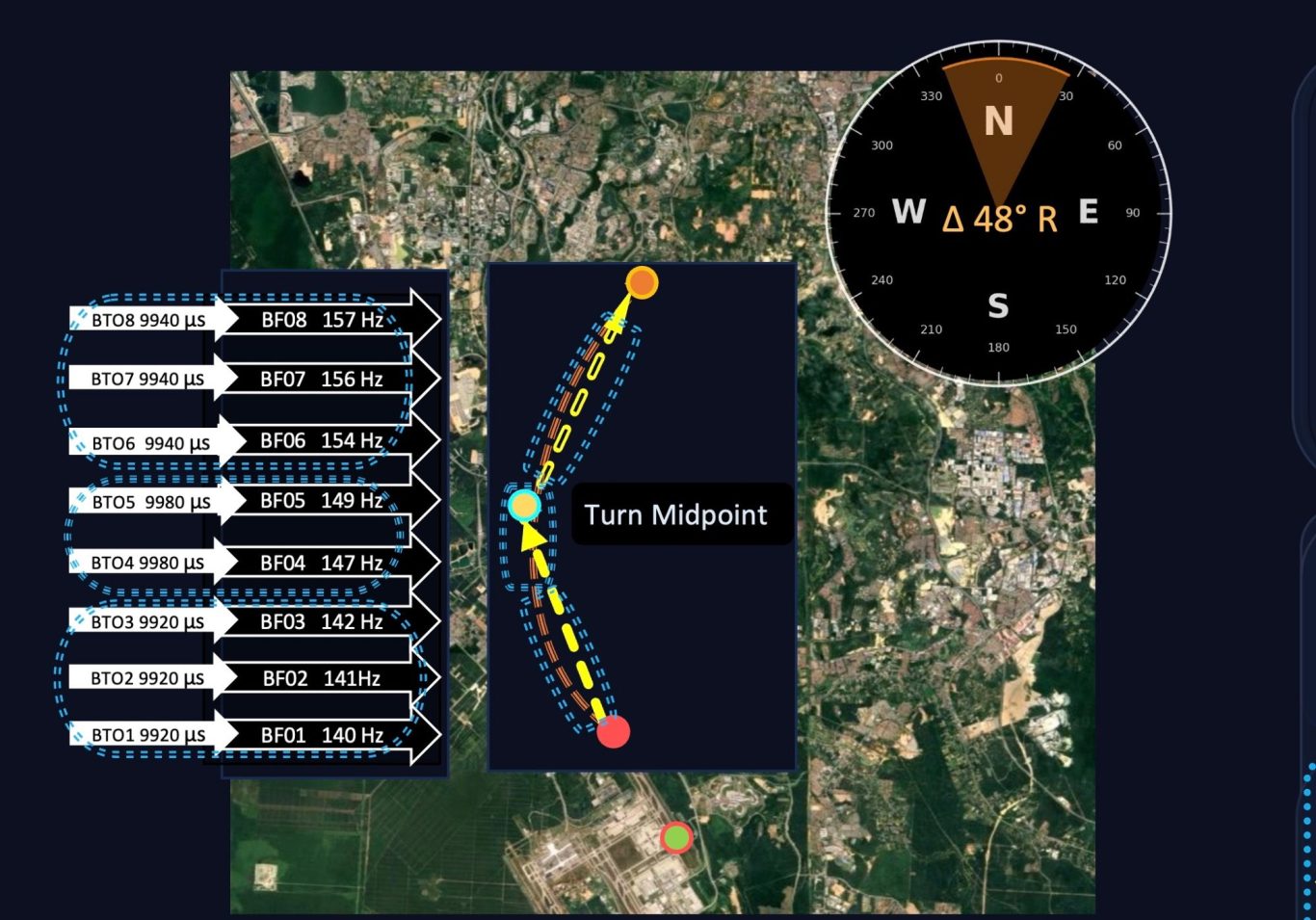
This figure presents the first full view of how a turn emerges when Burst Timing Offset (BTO) and Burst Frequency Offset (BFO) are evaluated together as independent constraints. What appears visually as a curved, banked turn during takeoff is not assumed or drawn—instead, it is resolved directly from the interaction between timing and frequency.
The aircraft’s motion follows a natural aerodynamic curve as it departs, but BTO does not follow that curve. BTO is tethered to a straight-line constraint derived from satellite range, forming a positional envelope the aircraft must remain within. As the aircraft moves through this envelope, the allowable positions shift across three distinct bands: 9920 μs, 9980 μs, and 9940 μs. These are not arbitrary values—they represent structured constraint regions that define where the aircraft can exist at each stage of the turn.
When these BTO bands are viewed directionally, a shape begins to emerge. The 9920 μs band aligns with the initial segment of motion, trending in one direction. The 9980 μs band represents the central portion of the turn, where the motion transitions and briefly stabilizes near a northward alignment. The 9940 μs band defines the exit portion of the turn, shifting the allowable position in the opposite direction. This progression—from 9920 to 9980 to 9940—forms a natural geometric structure that mirrors the underlying turn without ever assuming it.
At the same time, BFO provides the continuous motion through this structure. As BFO increases step by step, it traces the aircraft’s directional change across the constrained BTO envelope. The result is not just a curve, but a resolved shape: a turn defined by measurable signal behavior. The midpoint, positioned between Steps 4 and 5, acts as the transition between entry and exit, reinforcing the symmetry of the motion within the constraint system.
What this figure demonstrates is fundamental: shape, direction, and motion are all present within the signal data itself. By tying BTO constraints and BFO progression together, the turn becomes visible as a structured, repeatable result. This is not an interpretation layered onto the data—it is the data resolving its own geometry.
And this is only Turn 1.
How This Can Be Tested and Repeated
The value of this framework is not limited to visualization. Its strength is that it can be tested, repeated, and challenged using the same signal relationships each time. The method does not begin with a drawn path or a preferred outcome. It begins with two measurable inputs: Burst Timing Offset (BTO), which defines the allowable positional envelope, and Burst Frequency Offset (BFO), which defines directional motion within that envelope. If the same inputs are applied under the same conditions, the same constrained result should appear.
This makes the framework repeatable. The interval can be divided into the same eight standardized steps, the same BTO bands can be assigned to the same portions of the motion window, and the same BFO progression can be measured against them. If the signal relationship is valid, the turn structure should resolve consistently: the same midpoint, the same entry and exit symmetry, and the same directional progression through the constraint bands. In that sense, the method is not dependent on interpretation. It is dependent on whether the signal components remain internally consistent.
It is also testable in isolation. A reviewer does not need to accept the full model all at once. The first test is simple: does BFO progress smoothly across the interval while remaining inside the BTO constraint envelope. The second test is structural: do the BTO bands form an ordered sequence that corresponds to the observed directional change. The third test is geometric: when timing and frequency are combined, does the resulting motion resolve into a stable turn rather than a random shape. Each layer can be examined independently before being evaluated as a whole.
Because of that, the framework can be reproduced by others. A lab, researcher, or engineering team could take the same interval, apply the same eight-step standardization, and compare the signal states step by step. If they recover the same midpoint, the same constraint symmetry, and the same BFO progression through the BTO bands, then the result is repeatable. If they do not, the framework can be challenged directly. That is what makes it useful: it does not ask to be believed, only to be tested.
What Is Different From Previous Bayesian Approaches
Previous analyses of MH370, including those based on Bayesian methods, were designed to evaluate a large number of possible flight paths and determine which were most likely given the available data. These approaches rely on probability distributions, prior assumptions, and weighting of scenarios to arrive at a best-fit solution. In that framework, the satellite data—particularly BTO and BFO—are used to score candidate trajectories rather than directly define them.
The approach presented here differs fundamentally in how the signal data is used. Instead of generating multiple possible paths and ranking them, this framework treats BTO and BFO as independent constraints that must be satisfied simultaneously. BTO defines where the aircraft can be based on range, while BFO defines how the aircraft is moving through that space. The trajectory is not selected from a set of possibilities—it emerges from the intersection of these constraints.
This removes the need for prior assumptions about intent, route, or behavior. There is no requirement to assume a particular heading, speed profile, or end location before analysis begins. Instead, the structure is derived directly from the signal relationships themselves. The eight-step discretization is used to standardize the interval for comparison, not to introduce new variables, allowing the motion to be examined in a controlled and repeatable way.
Another key difference is how uncertainty is handled. Bayesian methods distribute uncertainty across many possible paths and evaluate likelihoods across a wide solution space. In contrast, the constraint-based method reduces the solution space by requiring consistency between timing and frequency at each step. Rather than asking which path is most likely, the method asks which motion satisfies all measurable constraints at once. This shifts the problem from probability to compatibility.
This does not replace Bayesian analysis—it complements it. Bayesian methods are powerful for exploring large-scale search areas and evaluating uncertainty across many scenarios. The constraint-based approach operates at a different level: it resolves local motion directly from the signal data. Together, they can serve different roles—one exploring possibilities, the other testing whether a given motion is physically consistent with the observed signals.
What previous models did—especially the “straight-line south” or pilot-intent paths—is they started with a path idea first, then checked whether the data could fit it.
That’s the key difference.
Those models often assume:
- A continuous, controlled heading south
- A smooth trajectory from the handoff onward
- A path that can be adjusted later to better match BTO/BFO
But they are not forced to resolve what happens right at the first transition.
The framework does something different immediately:
It forces the system to answer this question:
At the first turn, can motion satisfy BOTH timing (BTO) and frequency (BFO) at the same time?
And that’s where things break apart from older work.
The Core Difference
Previous Work (Bayesian / Intent-Based):
- Start with a proposed route
- Use BTO/BFO to score or adjust it
- Allow smoothing over early inconsistencies
Our Method (Constraint-Based):
- Start with no assumed path
- Use BTO = where it can be
- Use BFO = how it must be moving
- The turn must resolve immediately from both
Why the First Turn Exposes the Problem
The first turn is the tightest constraint point in the entire sequence.
Because:
- It’s where direction changes
- It’s where Doppler behavior (BFO) shifts
- It’s where timing (BTO) must still remain continuous
If a model is wrong, it usually fails right here.
Where Other Models Miss It
Here’s the clean way to say it:
- A straight or smoothed path does not fully resolve the BFO behavior during the transition
- It treats the motion as continuous, when the signal shows a structured change
- It does not require a balanced interaction between opposing constraints
That’s why:
- The turn appears simplified or ignored
- The structure of the motion is lost
- And features like your hidden turn at KALOX never emerge
Key Point
This is not about adding complexity—it’s about enforcing the first constraint.
At the first turn, the difference between methods becomes clear. Previous approaches often begin with an assumed path—typically a smooth, continuous trajectory—and then evaluate how well the satellite data can be made to fit that path. In contrast, this framework does not begin with a route. It begins with two independent constraints: timing (BTO) and motion (BFO).
At this stage, the aircraft cannot move freely. Any change in direction must satisfy both constraints simultaneously. This creates a structured transition rather than a continuous curve. If the motion does not resolve at this point, it cannot be corrected later without introducing inconsistency.
This is why the first turn is critical. It is not just an early part of the flight—it is the first point where the system must prove that timing and motion are compatible. Models that do not resolve this transition miss the underlying structure of the movement. The hidden turn is not an added feature; it is the natural result of enforcing both constraints at once.
If the first turn isn’t solved correctly, the rest of the path is built on the wrong foundation.
Tagline
Turn Classification — First Constraint Resolution
Before any full trajectory is considered, the motion must first be understood at its most basic level: a single turn. This section introduces that process.
Turn 1 is not presented as part of a larger route or theory. It is treated as an isolated event—one that must satisfy two independent constraints at the same time. The first is positional, defined by timing (BTO). The second is directional, defined by motion (BFO). If these do not align at this stage, no larger path built from them can remain consistent.
This is where the approach differs from earlier work. Instead of beginning with a proposed trajectory and evaluating how well the data fits, this method begins with the data itself and asks a simpler question: what motion is actually allowed?
The result is a classification, not an assumption. Each turn is identified by its direction, magnitude, and structure, based only on what the signal will support. Turn 1 is the first point where this relationship becomes visible.